
Abstract
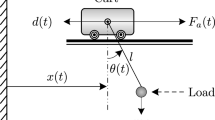
This article deals with a linear classical approach for the robust output reference trajectory tracking control of nonlinear SISO Lagrangian systems with a controllable (flat) tangent linearization around an operating equilibrium point. An endogenous injections and exogenous feedback (EIEF) approach is proposed, which is naturally equivalent to the generalized proportional integral control method and to a robust classical compensation network. It is shown that the EIEF controller is also equivalent, within a frequency domain setting demanding respect for the separation principle, to the reduced order observer based active disturbance rejection control approach. The proposed linear control approach is robust with respect to total disturbances and, thus, it is effective for the linear control of the nonlinear Lagrangian system. An illustrative nonlinear rotary crane Lagrangian system example, which is non-feedback linearizable, is presented along with digital computer simulations.








Similar content being viewed by others

References
Arnold, V. (1989). Mathematical Methods of Classical Mechanics. 2nd ed. New York: Springer.
Crouch, P. E., & van der Schaft, A. J. (1987). Variational and Hamiltonian Control Systems. Berlin: Springer.
Sira-Ramírez, H. (2018). From flatness, GPI observers, GPI control and flat filters to observer-based ADRC. Control Theory and Technology, 16(4), 249–260. https://doi.org/10.1007/s11768-018-8134-x.
Han, J. (2009). From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 56(3), 900–906.
Gao, Z., Huang, Y., & Han, J. (2001). An alternative paradigm for control system design. In Proceedings of the 40th IEEE Conference on Decision and Control (pp. 4578–4585). Orlando, Florida, USA.
Xue, W., & Huang, Y. (2015). Performance analysis of active disturbance rejection tracking control for a class of uncertain LTI systems. ISA Transactions, 58, 133–154.
Sira-Ramírez, H., & Gao, Z. (2020). Flatness based ADRC control of Lagrangian systems: A moving crane. In Proceedings of the IFAC World Congress. Berlin, Germany.
Brockett, R. W. (1970). Finite Dimensional Linear Systems. New York: Wiley.
Sira-Ramírez, H., & Aggrawal, S. (2004). Differentially Flat Systems. Boston: Marcel Dekker.
Åström, K. J., & Murray, R. M. (2008). Feedback Systems: An Introduction for Scientists and Engineers. Princeton: Princeton University Press.
Sira-Ramírez, H., Luviano-Juárez, A., Ramírez-Neira, M., & Zurita-Bustamante, W. E. (2017). Active Disturbance Rejection Control of Dynamic Systems. Oxford: Elsevier.
Fliess, M., Márquez, R., Delaleau, E., & Sira-Ramírez, H. (2002). Correcteurs proportionnels-intègraux généralisés. ESAIM, Control, Optimization and Calculus Variations, 7(1), 23–41.
Zurita Bustamante, E. W., Sira-Ramírez, H., & Linares-Flores, J. (2018). An equivalence between the adrc and the flat filtering controllers: A case study in double buck converter. In Proceedings of the 14th IEEE International Conference on Power Electronics (pp. 188–193). Puebla, Mexico.
Sira-Ramírez, H., Zurita-Bustamante, E. W., & Huang, C. (2020). Equivalence among flat filters, dirty derivative-based PID controllers, ADRC, and integral reconstructor-based sliding mode control. IEEE Transactions on Control Systems Technology, 28(5), 1696–1710.
Fliess, M., Levine, J., Rouchon, P., & Martin, Ph. (1995). Flatness and defect of non-linear systems: Introductory theory and examples. International Journal of Control, 61(6), 1327–1361.
Acknowledgements
The work of M. A. Aguilar-Orduña and B. C. Gómez-León was supported by Consejo Nacional de Ciencia y Tecnología (CONACYT) Mexico under Scholarship Grants no. 702805 and no. 1039577, respectively.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sira-Ramírez, H., Aguilar-Orduña, M.A. & Gómez-León, B.C. Active disturbance rejection control of nonlinear SISO Lagrangian systems via endogenous injections and exogenous feedback for trajectory tracking. Control Theory Technol. 19, 113–126 (2021). https://doi.org/10.1007/s11768-021-00033-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11768-021-00033-3