
Abstract
In this work, the problem of designing a robust control algorithm for a DC-DC buck power converter is investigated. The applied solution is based on a recently proposed error-based version of the active disturbance rejection control (ADRC) scheme, in which the unknown higher-order terms of the reference signal are treated as additional components of the system “total disturbance”. The motivation here is to provide a practical following of a reference voltage trajectory for the buck converter in specific cases where neither the analytical form of the desired signal nor its future values are known a’priori, hence cannot be directly used for control synthesis. In this work, the application of the error-based ADRC results in a practically appealing control technique, with compact structure, simplified control rule, and intuitive tuning (inherited from the conventional output-based ADRC scheme). Theoretical, numerical, and experimental results are shown to validate the efficacy of the error-based ADRC in buck converter control, followed by a discussion about the revealed theoretical and practical limitations of this approach.



























Similar content being viewed by others
Notes
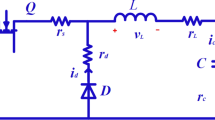
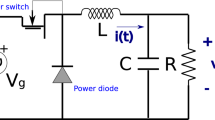
In the considered average model, it has replaced the discrete input \(\mu \in \{0,1\}\), since PWM strategy is used here to generate governing signal from an analog input signal.
Note that the linear system description is valid only as long as it can be ensured that no saturation effects occur in the coil. Otherwise, the inductance L would depend on the current \(i_L\) nonlinearly.
Subscript “0” represents the nominal value of the parameter.
Notation of signals dependence (on time, on states, etc.) will be omitted here and throughout the paper for presentation clearance (e.g., \(v(t,x)=: v(\,\cdot \,) =: v\)) with exception of instants when specification is notably important for the considered context.
Overscore will be used hereinafter to distinguish signals reconstructed by the differentiator from the ones estimated by the observer (circumflex).
One could include this term also in the ESO. However, since both reference (\(v_r\)) and output (\(v_o\)) are assumed here to be available at current time, it is thus reasonable to keep proportional action \(\mu _0 = k_0 e=k_0(v_r-v_o)\) to robustify the control design in the presence of estimation errors, inevitable in practical scenarios [19].
Same observer parametrization has been done in Sect. 4.1.3.
This emulates a scenario where the target signal comes from an outer-loop (i.e., cascade control) or from an entirely different, outside system.
References
Nizami, T. K., Chakravarty, A., & Mahanta, C. (2021). Time bound online uncertainty estimation based adaptive control design for DC-DC buck converters with experimental validation. IFAC Journal of Systems and Control, 15, 100127. https://doi.org/10.1016/j.ifacsc.2020.1001275.
Han, J. (2009). From PID to active disturbance rejection control. IEEE Transactions on Industrial Electronics, 56(3), 900–906. https://doi.org/10.1109/TIE.2008.2011621.
Gao, Z. (2014). On the centrality of disturbance rejection in automatic control. ISA Transactions, 53(4), 850–857. https://doi.org/10.1016/j.isatra.2013.09.012.
Chen, W. H., Yang, J., Guo, L., & Li, S. (2016). Disturbance-observer-based control and related methods – an overview. IEEE Transactions on Industrial Electronics, 63(2), 1083–1095. https://doi.org/10.1109/TIE.2015.2478397.
Madonski, R., & Herman, P. (2015). Survey on methods of increasing the efficiency of extended state disturbance observers. ISA Transactions, 56, 18–27. https://doi.org/10.1016/j.isatra.2014.11.0081.
Radke, A., & Gao, Z. (2006). A survey of state and disturbance observers for practitioners. In Proceedings of the American Control Conference (pp. 5183–5188). Minneapolis, MN, USA. https://doi.org/10.1109/ACC.2006.1657545.
Sariyildiz, E., Oboe, R., & Ohnishi, K. (2020). Disturbance observer-based robust control and its applications: 35th anniversary overview. IEEE Transactions on Industrial Electronics, 67(3), 2042–2053. https://doi.org/10.1109/TIE.2019.2903752.
Zheng, Q., & Gao, Z. (2018). Active disturbance rejection control: some recent experimental and industrial case studies. Control Theory and Technology, 16(4), 301–313. https://doi.org/10.1007/s11768-018-8142-x.
Aguilar-Ibanez, C., Sira-Ramirez, H., & Acosta, J. A. (2017). Stability of active disturbance rejection control for uncertain systems: a Lyapunov perspective. International Journal of Robust and Nonlinear Control, 27(18), 4541–4553. https://doi.org/10.1002/rnc.3812.
Nowicki, M., Madonski, R., & Kozlowski, K. (2015). First look at conditions on applicability of ADRC. In International Workshop on Robot Motion and Control (pp. 294–299). Poznan, Poland. https://doi.org/10.1109/RoMoCo.2015.7219750.
Shao, S., & Gao, Z. (2017). On the conditions of exponential stability in active disturbance rejection control based on singular perturbation analysis. International Journal of Control, 90(10), 2085–2097. https://doi.org/10.1080/00207179.2016.1236217.
Wu, Z. H., Zhou, H. C., Guo, B. Z., & Deng, F. (2020). Review and new theoretical perspectives on active disturbance rejection control for uncertain finite-dimensional and infinite-dimensional systems. Nonlinear Dynamics, 101(2), 935–959. https://doi.org/10.1007/s11071-020-05845-7.
Xue, W., & Huang, Y. (2015). Performance analysis of active disturbance rejection tracking control for a class of uncertain LTI systems. ISA Transactions, 58, 133–154. https://doi.org/10.1016/j.isatra.2015.05.001.
Xue, W., & Huang, Y. (2018). Performance analysis of 2-DOF tracking control for a class of nonlinear uncertain systems with discontinuous disturbances. International Journal of Robust Nonlinear Control, 28, 1456–1473. https://doi.org/10.1002/rnc.3972.
Sira-Ramirez, H., Luviano-Juarez, A., & Cortes-Romero, J. (2013). Robust input-output sliding mode control of the buck converter. Control Engineering Practice, 21(5), 671–678. https://doi.org/10.1016/j.conengprac.2012.03.008.
Wang, J., Li, S., Yang, J., Wu, B., & Li, Q. (2015). Extended state observer-based sliding mode control for PWM-based DC-DC buck power converter systems with mismatched disturbances. IET Control Theory Applications, 9(4), 579–586. https://doi.org/10.1049/iet-cta.2014.0220.
Wang, J., Li, S., Yang, J., Wu, B., & Li, Q. (2016). Finite-time disturbance observer based non-singular terminal sliding-mode control for pulse width modulation based DC-DC buck converters with mismatched load disturbances. IET Power Electronics, 9(9), 1995–2002. https://doi.org/10.1049/iet-pel.2015.0178.
Yang, J., Cui, H., Li, S., & Zolotas, A. (2017). Optimized active disturbance rejection control for DC-DC buck converters with uncertainties using a reduced-order GPI observer. IEEE Transactions on Circuits and Systems, 65(2), 832–841. https://doi.org/10.1109/TCSI.2017.2725386.
Michalek, M. M. (2016). Robust trajectory following without availability of the reference time-derivatives in the control scheme with active disturbance rejection. In Proceedings of the American Control Conference (pp. 1536–1541). Boston, MA, USA. https://doi.org/10.1109/ACC.2016.7525134.
Zhang, H. (2017). Information Driven Control Design: A Case for PMSM Control. Ph.D. thesis. Cleveland: Cleveland State University.
Madonski, R., Stankovic, M., Ferdjali, A., Shao, S., & Gao, Z. (2020). General ADRC design for systems with periodic disturbances of unknown and varying frequencies. Journal of Dynamic Systems, Measurement, and Control, 143(1), 011006. https://doi.org/10.1115/1.4048353.
Madoński, R., Stankovic, M., Shao, S., Gao, Z., Yang, J., & Li, S. (2020). Active disturbance rejection control of torsional plant with unknown frequency harmonic disturbance. Control Engineering Practice, 100, 104413. https://doi.org/10.1016/j.conengprac.2020.104413.
Chen, S., Chen, Z., & Zhao, Z. (2020). An error-based active disturbance rejection control with memory structure. Measurement and Control. https://doi.org/10.1177/0020294020915219.
Ramírez-Neria, M., Madonski, R., Luviano-Jurez, A., Gao, Z., & Sira-Ramírez, H. (2020). Design of ADRC for second-order mechanical systems without time-derivatives in the tracking controller. In Proceedings of the American Control Conference (pp. 2623–2628). Denver, CO, USA. https://doi.org/10.23919/ACC45564.2020.9147338.
Łakomy, K., & Madonski, R. (2020). Cascade extended state observer for active disturbance rejection control applications under measurement noise. ISA Transactions. https://doi.org/10.1016/j.isatra.2020.09.007.
Łakomy, K., Madonski, R., Dai, B., Yang, J., Kicki, P., Ansari, M., et al. (2021). Active disturbance rejection control with sensor noise suppressing observer for DC-DC buck power converters. IEEE Transactions on Industrial Electronics,. https://doi.org/10.1109/TIE.2021.3055187.
Ramírez-Neria, M., Madonski, R., Shao, S., & Gao, Z. (2020). Robust tracking in underactuated systems using flatness-based ADRC with cascade observers. Journal of Dynamic Systems, Measurement, and Control, 142(9), 091002. https://doi.org/10.1115/1.4046799.
Łakomy, K., Patelski, R., & Pazderski, D. (2020). ESO architectures in the trajectory tracking ADR controller for a mechanical system: a comparison. A. Bartoszewicz, J. Kabziński, & J. Kacprzyk (Eds.), Advanced, Contemporary Control. (pp. 1323–1335) Cham: Springer. https://doi.org/10.1007/978-3-030-50936-1_110.
Łakomy, K., & Michaek, M. (2020). Robust output-feedback VFO-ADR control of underactuated spatial vehicles in the task of following non-parametrized paths. European Journal of Control. https://doi.org/10.1016/j.ejcon.2020.07.006.
Lechekhab, T. E., Manojlovic, S., Stankovic, M., Madonski, R., & Simic, S. (2020). Robust error-based active disturbance rejection control of a quadrotor. Aircraft Engineering and Aerospace Technology. https://doi.org/10.1108/AEAT-12-2019-0266.
Madonski, R., Łakomy, K., & Yang, J. (2020). Comparative study of output-based and error-based ADRC schemes in application to buck converter-fed DC motor system. In IEEE Conference on Decision and Control (pp. 2744–2749). Jeju Island, South Korea. https://doi.org/10.1109/CDC42340.2020.9304198.
Madonski, R., Shao, S., Zhang, H., Gao, Z., Yang, J., & Li, S. (2019). General error-based active disturbance rejection control for swift industrial implementations. Control Engineering Practice, 84, 218–229. https://doi.org/10.1016/j.conengprac.2018.11.021.
Madonski, R., Gao, Z., & Lakomy, K. (2015). Towards a turnkey solution of industrial control under the active disturbance rejection paradigm. In Conference of the Society of Instrument and Control Engineers of Japan (pp. 616–621). Hangzhou, China. https://doi.org/10.1109/SICE.2015.7285478.
Xue, W., Huang, Y., & Yang, X. (2010). What kinds of system can be used as tracking-differentiator. In Proceedings of the Chinese Control Conference (pp. 6113–6120). Beijing, China.
Gao, Z. (2003). Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference (pp. 4989–4996). Denver, CO, USA. https://doi.org/10.1109/ACC.2003.1242516.
Sira-Ramirez, H., & Silva-Ortigoza, R. (2006). Control Design Techniques in Power Electronics Devices. London: Springer.
Kokotovic, P., Khalil, H. K., & O’Reilly, J. (1999). Singular Perturbation Methods in Control: Analysis and Design. Philadelphia: SIAM. https://doi.org/10.1137/1.9781611971118.
Sira-Ramirez, H., Linares-Flores, J., Garcia-Rodriguez, C., & Contreras-Ordaz, M. A. (2014). On the control of the permanent magnet synchronous motor: an active disturbance rejection control approach. IEEE Transactions on Control Systems Technology, 22(5), 2056–2063. https://doi.org/10.1109/TCST.2014.2298238.
Acknowledgements
This work was supported by the Fundamental Research Funds for the Central Universities (No. 21620335).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Madonski, R., Łakomy, K. & Yang, J. Simplifying ADRC design with error-based framework: case study of a DC–DC buck power converter. Control Theory Technol. 19, 94–112 (2021). https://doi.org/10.1007/s11768-021-00035-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11768-021-00035-1